当社では、これまでのプラントメーカーとしての経験や実績から、「東京電力ホールディングス(株)福島第一原子力発電所1~4号機の廃止措置等に向けた中長期ロードマップ(中長期ロードマップ)」や「廃炉中長期実行プラン2020」(*)で示された廃止措置等の取り組みに関し、汚染水対策やプール燃料取り出しに関する設備を、東京電力ホールディングス株式会社へ納入しています。
「中長期ロードマップ」や「廃炉中長期実行プラン2020」で示された廃止措置等の取り組みに関する中長期的な課題に対する研究開発として、以下に示す活動を行っています。
今後も技術開発を通じて、今後も福島第一原子力発電所の廃止措置対応に貢献していきます。
当社は、資源エネルギー庁の「建屋内の遠隔除染技術の開発」プロジェクトにおいて、福島第一原子力発電所の災害現場における放射線汚染環境の改善を目的とした高圧水を用いる遠隔除染装置「Arounder*」を開発しました。
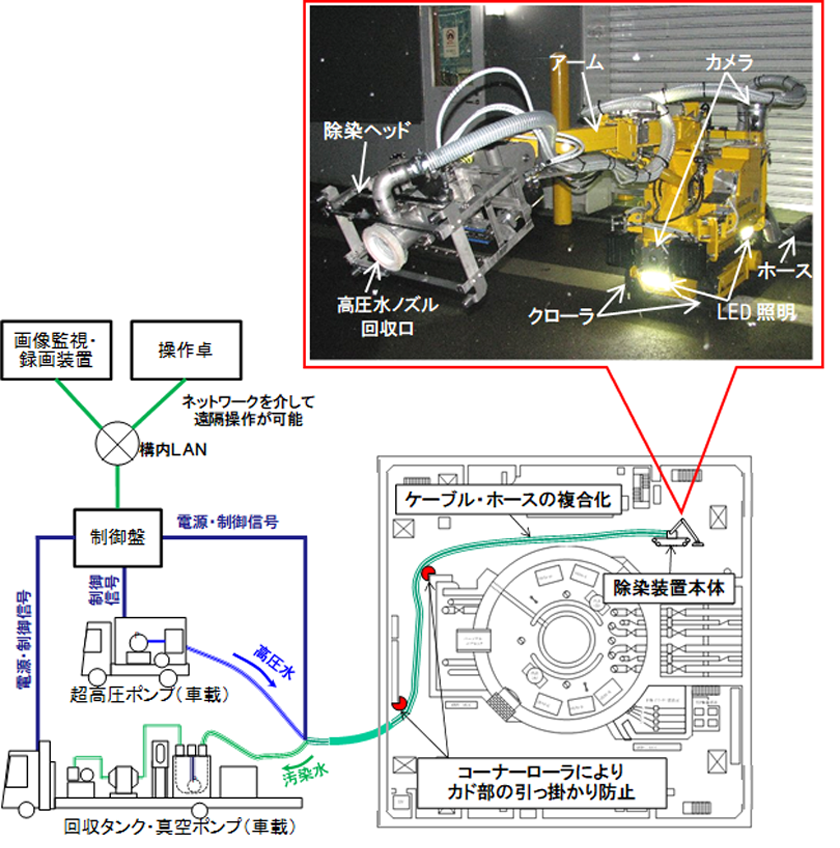
写真1 高圧水を用いる遠隔除染装置「Arounder」
日立と日立GEベルノバニュークリアエナジーは、福島第一原子力発電所での燃料取り出しに向けた調査用の水中走行遊泳型ロボット・形状変化型ロボットを開発しました。
水中走行遊泳型ロボットは、水で満たされた発電所建屋内を調査するためのロボットであり、原子力発電所の滞留水の漏えい箇所を水中から調査する装置として活用できます。
また、原子力発電所には放射線量が高い領域があり、対象部位に装置を挿入するための開口部は極力小さくする必要がある一方、小型の移動装置は走行が安定しないため踏破性に課題がありました。今回、2つの小型クローラを組み合わせ安定走行できる移動装置を基本形状とし、狭隘空間を通過可能な形状に変化させることができるロボットを開発しました。
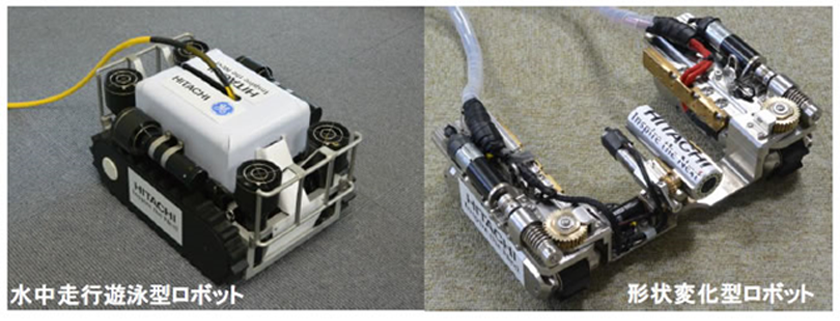
写真2 水中走行遊泳型ロボット(左)および形状変化型ロボット(右)
当社は、技術研究組合 国際廃炉研究開発機構(略称:IRID(International Research Institute for Nuclear Decommissioning)の創設時からの組合員として、廃炉措置に関する研究開発等の事業を実施しており、以下のような活動を行っています。
福島第一原子力発電所 1号機、2号機及び3号機には、原子炉格納容器(PCV)の内部に燃料デブリが存在する可能性があります。その取り出しのためには、PCVの内部状態を調査する必要があり、当社はその調査装置を開発しています。
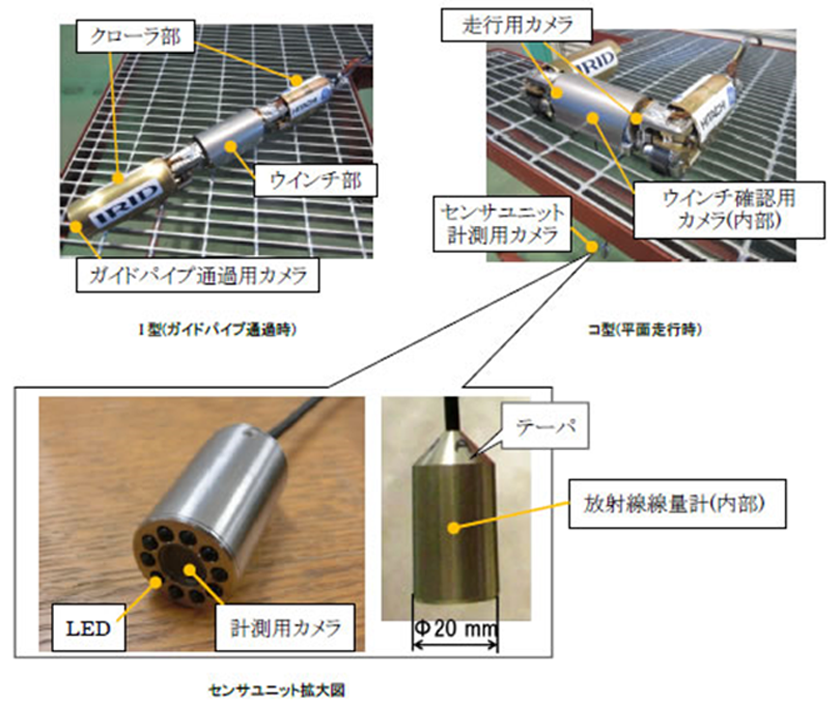
写真3 原子炉格納容器内部調査用ロボット(PMORPH※)
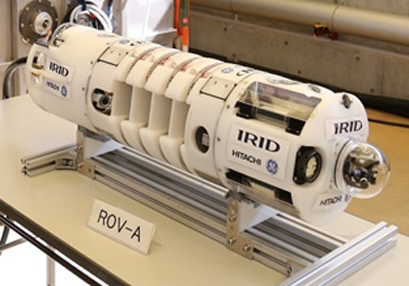
写真4 原子炉格納容器内部詳細調査用潜水機能付ボート型アクセス調査装置
高線量環境での作業が想定される燃料デブリ取り出しにおいて、耐放射性、耐衝撃性に優れ、遠隔での作業が可能な「柔構造アーム(筋肉ロボット)」の適用に関する研究を行っています。
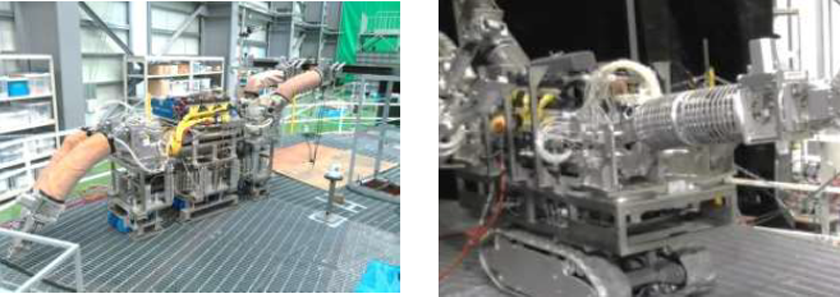
写真5/写真6 柔構造アーム(筋肉ロボット)
(写真5、6:想定作業:重量物の取り扱い、前後腕間の受け渡し作業、組み立て、解体など)

写真7 柔構造アーム(筋肉ロボット)
(想定作業:カメラ設置などの環境整備、ケーブルの取り扱いなど)
写真8 柔構造アーム(筋肉ロボット)
(想定作業:組み立て、解体など)

写真9/写真10 柔構造アーム(筋肉ロボット)
(写真9:想定作業:狭隘部進入、ウインチとの連携による吊降ろし、「しがみつき」による昇り降り、長尺物吊り上げ
写真10:想定作業:人代替作業、狭隘部、ぶら下がり移動など)
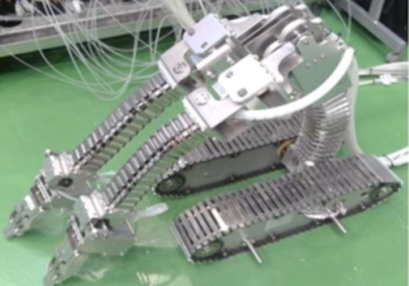
写真11 柔構造アーム(筋肉ロボット)
(想定作業:他ロボットのケーブル整線、狭隘箇所での作業)